
Reports
Contents
| Title: | Camera comparison at Mayberry |
| Date: | 2022-02-17 |
| Data File: | MBautocam_20220217.csv MBpicam_20220217.csv MBpicamFWB_20220217.csv MBstardot_20220217.csv |
| Refers to: | RPI0W-003,0030F4D214A4 |
|
Starting in May 2021, we set up several cameras on the Mayberry tower to compare their GCC results. Besides the Autocam (Canon) camera that has been running forever there, we added a Raspberry Pi camera (Picam) in May and a Stardot camera in June. The Stardot camera is the official camera of the Phenocam network and it is set with a fixed white balance. The Autocam and the Picam have a dynamic white balance that the camera adjusts according to the light conditions.
Since the initial Picam data was kind of noisy, Joe set up the Picam to save 2 photos from each time point, 1 photo with a dynamic white balance and 1 photo with a fixed white balance (FWB). Starting in September, there are 2 "Picam" data series in the figures. The hope is that the FWB would reduce the noise in the Picam data.
For this analysis, I defined midday as 11:15-13:15, inclusive. The comparison ended on 2022-02-17 when I removed the Canon autocam from the tower to bring back to the lab for testing. The Canon photos were consistently underexposed/dark during some daytime hours.
Summary:
2 of the 3 cameras on the same post on the Mayberry tower. All cameras were facing west. 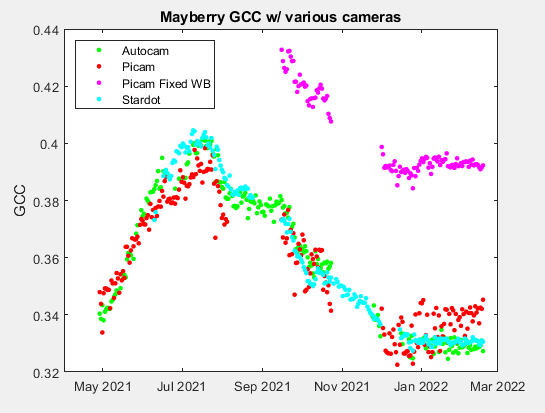 Fig 1. Time series of midday GCC calculated from various cameras. Overall the 3 cameras have GCC that actually match pretty well. Picam FWB is offset from the GCC, which is ok because we could adjust the gains for R, G, B to have it match the GCC of the other cameras. In general we are interested in the relative GCC at our sites, not necessarily the absolute GCC.
All data
First, I was interested in how well we can use other cameras to fill in the gaps in the Autocam data so I plotted the linear regression lines. There is a big chunk of Autocam data missing in Oct/Nov 2021, so it would be nice to fill it in with something before running the ANN (if GCC is one of the predictor variables).
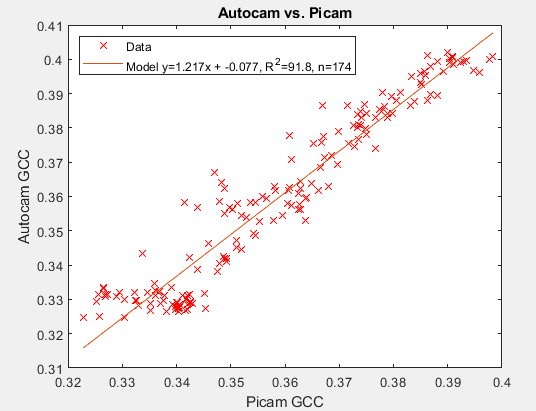 Fig 2. Linear regression between Picam GCC and Autocam GCC. Some scatter around the line but there's a definite relationship with R2=92%.
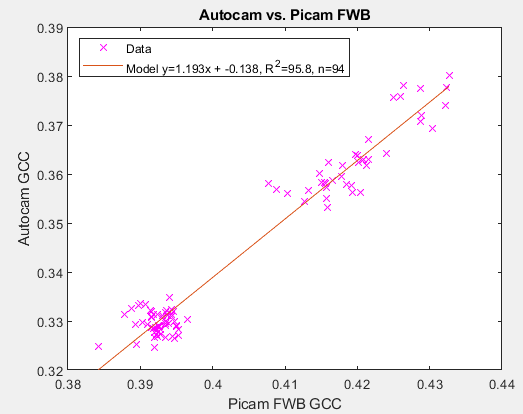 Fig 3. Linear regression between Picam FWB GCC and Autocam GCC. Two groupings of data from either super green vegetation or senesced vegetation. The Picam was killed by the power issues in the fall so there was no Picam data from most of November 2021.
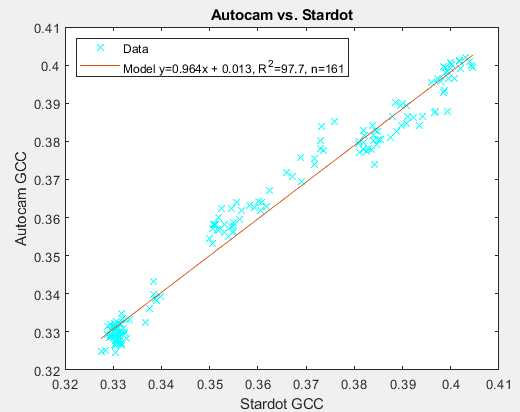 Fig 4. Linear regression between Stardot GCC and Autocam GCC. This has the best fit with R2=98%. For filling in missing Autocam data in Oct/Nov, I would use this relationship with the Stardot camera since Stardot data is available during that time chunk.
AutocamGCC=0.964*(StardotGCC)+0.013
In general, the linear fits are all pretty good, with slopes within 20% of 1, offsets ~0, and R2>90%. However, Figure 2 shows the Picam data is a lot messier than the Picam FWB or the Stardot data.
Data subset - only when all 3 cameras were running
Since the cameras were up for different lengths of time, I want to control the "n" in the R2 calculation when I compare all three. I restricted my analysis to the days when all 3 cameras had data. This turned out to be 94 days (not continuous) between 2021-09-15 and 2022-02-27.
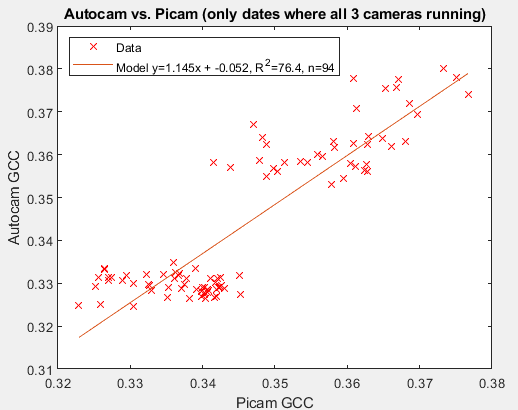 Fig 5. Linear regression between Picam and Autocam GCC for a subset of dates when all 3 camera types were running. R2 is markedly lower with R2 at only 76%. Data from senescent vegetation is more heavily weighted here than when looking at the whole time series. When the vegetation has already senesced, there's not much change in GCC, and the Picam signal to noise ratio gets worse (more noise).
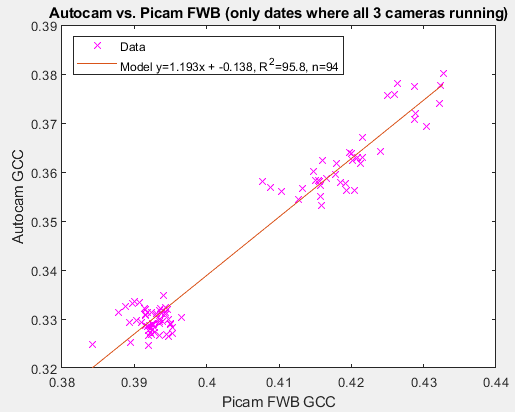 Fig 6. Linear regression between Picam FWB and Autocam GCC. The R2 (96%) here is much better than the R2 (76%) when comparing Picam (dynamic WB) and Autocam GCC in Fig 5.
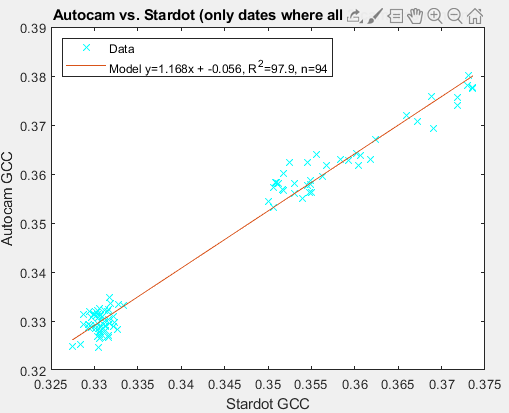 Fig 7. Linear regression between Stardot GCC and Autocam GCC. The fit is still very good (R2=98%) and is comparable to the fit between Picam FWB and Autocam GCC (R2=96%). Given the cost differences between the Stardot camera (0+) and the Picam (~0), the Picam FWB seems like a decent substitute for the Stardot camera. The downside to the Pi Zero W is that it can be hard to find.
Update 2024-07-01
I looked at the linear correlation between the Autocam (Canon) and Picam GCC, which had a relationship AutocamGCC=1.217*PicamGCC-0.077, R2=92% (Fig 2). The main thing throwing off this relationship is that the Picam GCC during the winter (low GCC) is much messier than the Autocam data. This was a pretty good fit, so right now from the database we are downloading uncorrected Picam data.
I applied this relationship to the rest of the Picam data to see how much of a difference it would make. To me, these two data series are pretty much indistinguishable. The summer peak is slightly higher in the corrected data (black dots), but the difference is smaller than the year-to-year variability.
Autocam (Canon) = green dots Picam uncorrected = red dots Picam corrected = black dots 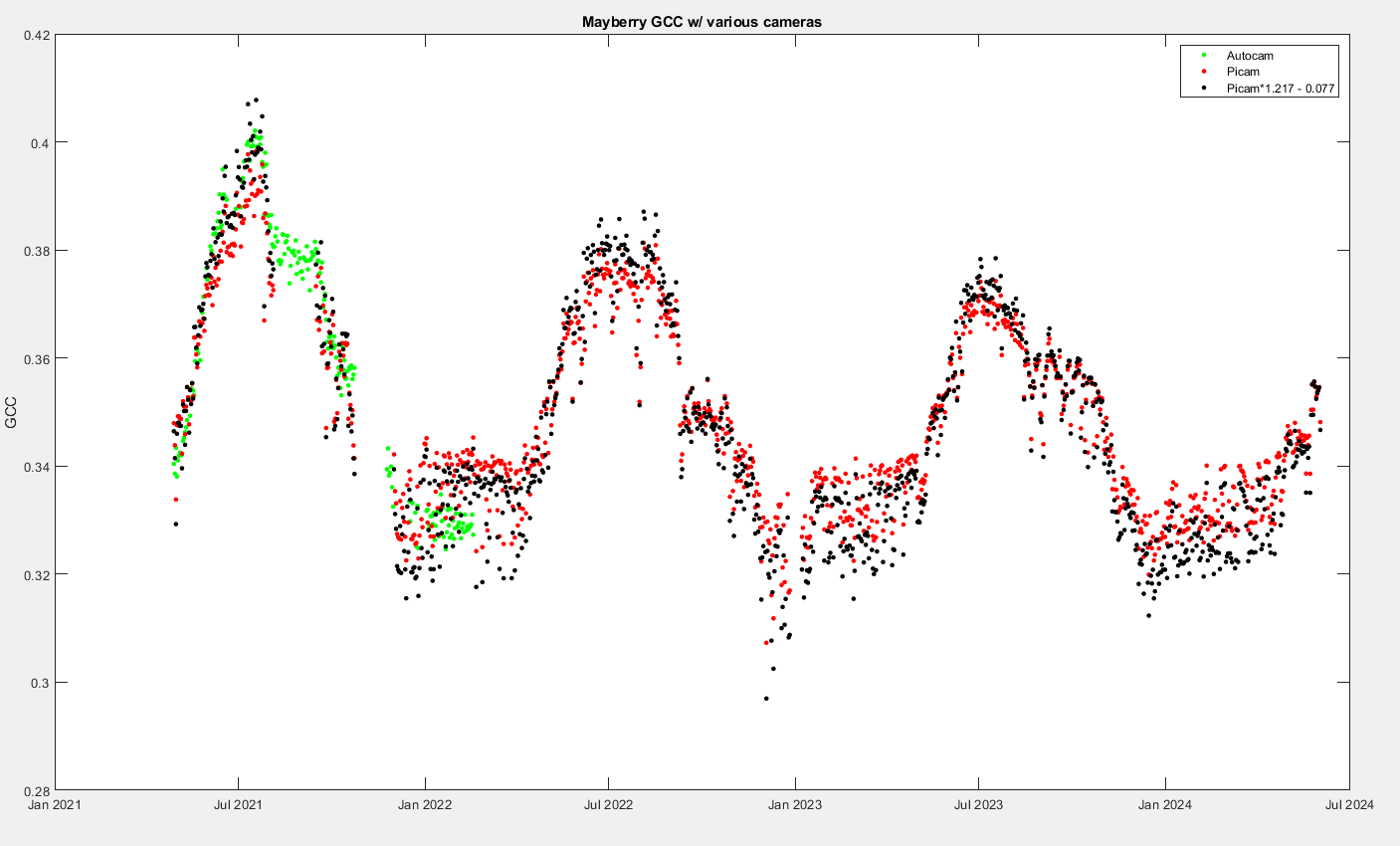 I also added in 7-day moving means as lines in the figure below. I don't think the camera change impacted the GCC that much so this data is probably ok to use as is. Someone might want to run statistics to demonstrate that there's no significant difference between the Autocam (Canon) and Picam data.
Autocam (Canon) = green dots, green line Picam uncorrected = red dots, red line Picam corrected = black dots, black line 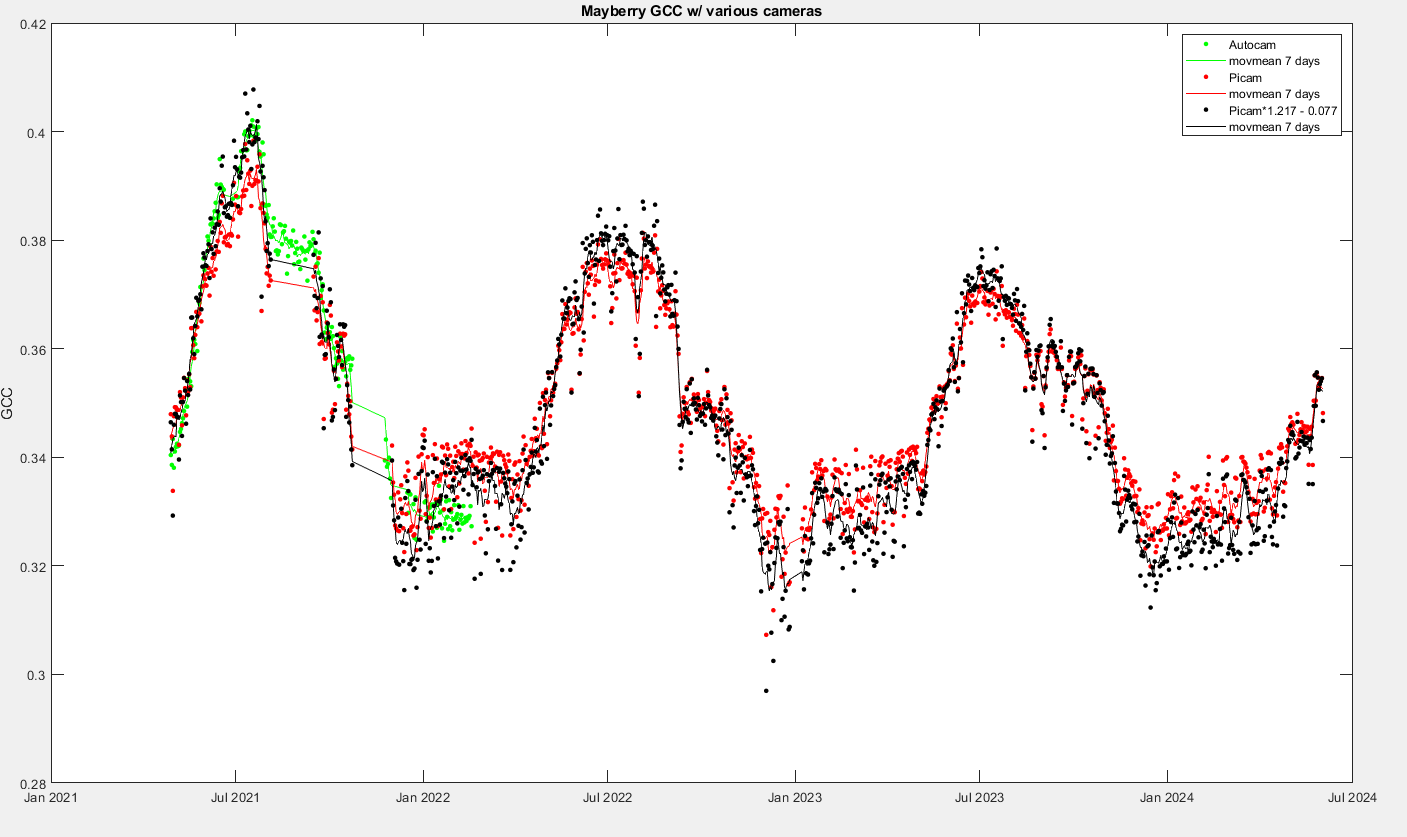 MATLAB Code
|
|

| |